
TT-CopterRedundancy
TT-CR V1
Diese winzige Platine ermöglicht es die Steuereinheit eines Quadrocopters / Multicopters redundant auszulegen, ohne Zusatzgewicht oder viel Platzverbrauch.
Es kann mit dieser Platine im Flug per Servokanal zwischen 2 beliebigen (auch unterschiedlichen) Multicopter Steuerungen umgeschaltet werden. Dadurch ist immer ein Backup-System vorhanden. Ohne mechanische Bauteile wie Relais ist die Einheit sehr betriebssicher.
Kompatibel ist die Platine zu allen Multicoptersteuerungen die PPM-gesteuerte Motorregler verwenden (fast alle tun das).
Der Anschluss ist kinderleicht, keine Einrichtung erforderlich.
Sollen mehr als 4 Motoren gesteuert werden ist für jeweils 4 zusätzliche Motoren eine weitere TT-CR Platine erforderlich. Dadurch ergibt sich eine zusätzliche Ausfallsicherheit.
TT-CopterControl + TT-HoverControl
Bei Verwendung der Kombination aus TT-CopterControl und TT-HoverControl ist bereits ohne Redundanzplatine
eine sehr hohe Ausfallsicherheit gegeben.
Wird mit der Fernsteuerung der HeadingHold-Mode ausgewählt wird die TT-HoverControl vollständig deaktiviert und die TT-CopterControl übernimmt die alleinige Kontrolle.
Dies würde auch bei einem Totalausfall der TT-HoverControl sicher funktionieren und eine sichere Landung ermöglichen.
Daten
- Größe: 21 x 24 mm
- Gewicht: 1g
- Funktioniert mit fast jeder Multicoptersteuerung
- Keine Einrichtung erforderlich
- Updatefähig
- Sofort Betriebsfertig
Kompatibilität
- TT-CopterControl
- DJI Naza / Wookong
- Ardupilot
- MultiWii
- KK
- HK
- QuadroControl
- uvw.
Anschluss
An der TT-CR Platine wird angeschlossen:
- Empfängerkanal/Servokanal zum Umschalten zwischen den beiden Steuerplatinen
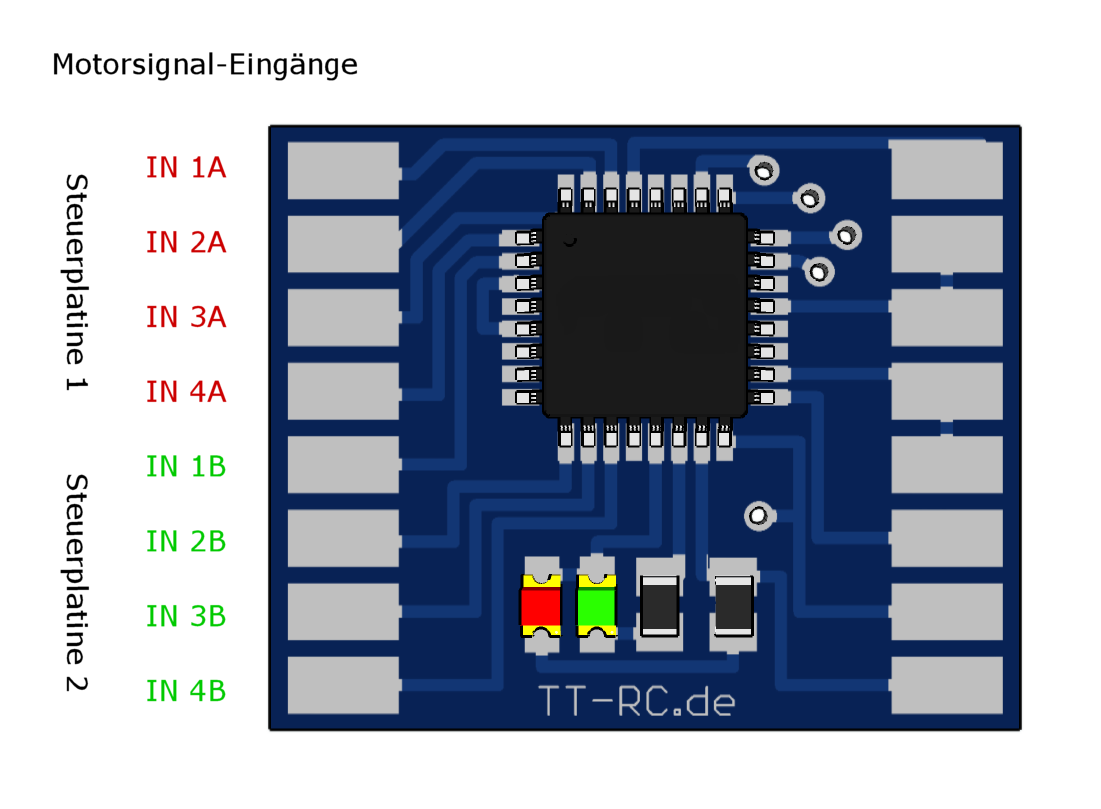
- 4 Motorregler-Steuerausgänge von Copter-Steuerung A (IN 1A bis IN 4A)
- 4 Motorregler-Steuerausgänge von Copter-Steuerung B (IN 1B bis IN 4B)
- 4 Motorregler-Steuerausgänge zu den Motorreglern (OUT 1 bis OUT 4)
Die Anschlüsse sind auf den Bildern rechts beschriftet. (Maus zum Vergrößern)
Wichtig: Steuerung A ist die Hauptsteuereinheit des Copters, Steuerung B ist die Backup/Ersatz-Steuerung.
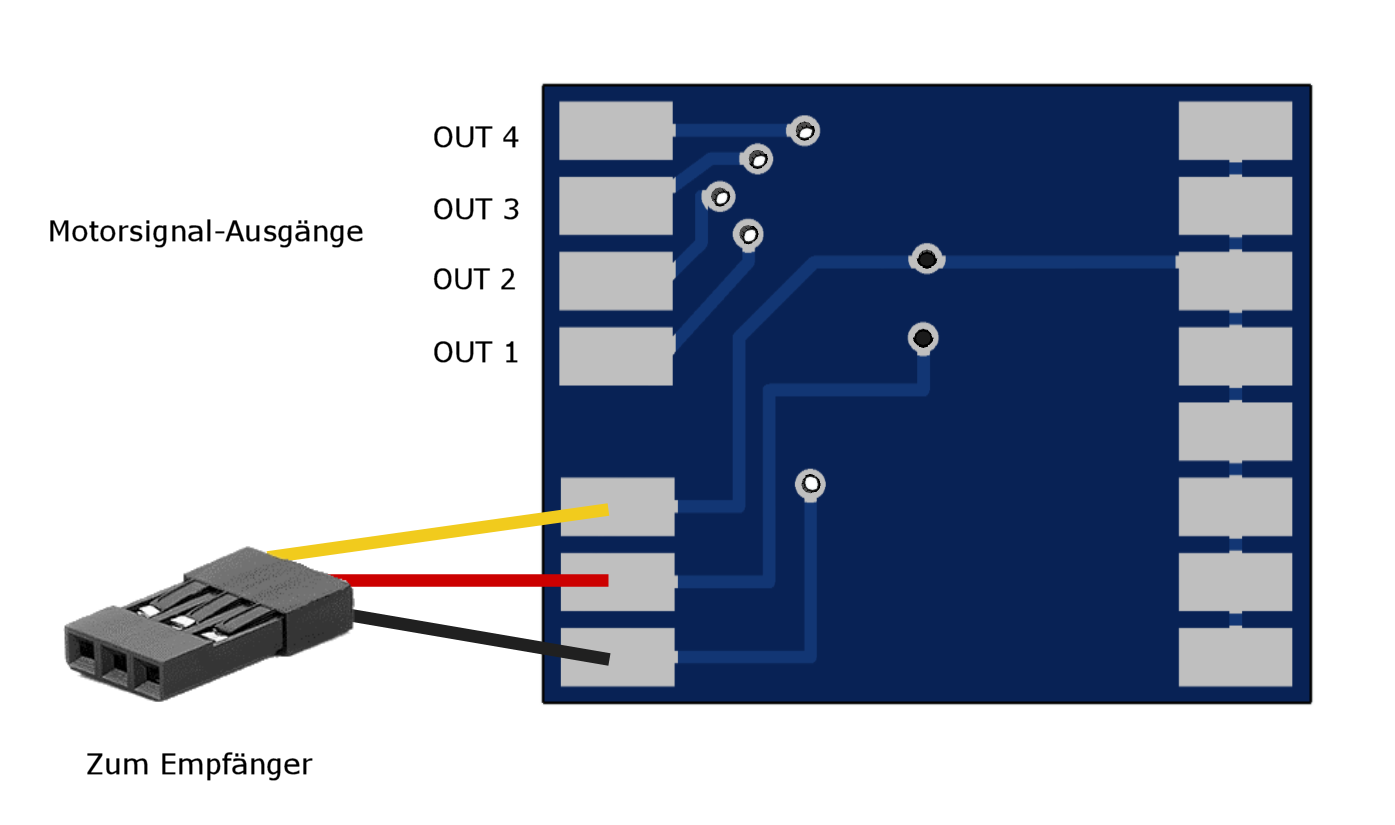
Die Stromversorgung der TT-CR Platine erfolgt durch den Empfänger, es ist keine weitere Stromversorgung erforderlich.
Nach dem Anschluss ist die Platine sofort einsatzbereit, es sind keine Einstellungen erforderlich.
Bedienung
Mit dem Servokanal kann zwischen den beiden Platinen gewechselt werden.
Die TT-CR Platine zeigt die aktive Steuerung durch eine rote und eine grüne LED an.
LED-Signale
- Rot + Grün: Warten auf Servosignal
- Grün: Steuerplatine A wird verwendet
- Rot: Steuerplatine B wird verwendet
- LED-Flackern: Fehler (Achtung: so nicht fliegen!)
Warnung!
Bei den ersten Tests die Propeller abmontieren und/oder den Copter gut befestigen!
Für etwaige Schäden oder Verletzungen, die aus einer unsachgemäßen Handhabung hervorgehen, kann keine Haftung übernommen werden.
----