
Motordrehrichtungen
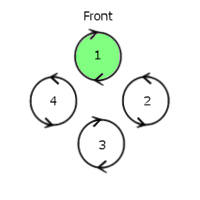

Die Propeller/Motoren müssen (von oben gesehen) in diese Richtung laufen:
- Vorne/Hinten: Im Uhrzeigersinn
- Links/Rechts: Gegen den Uhrzeigersinn
Im X-Mode (2 Motoren vorne) liegt die Front des TT-Copters zwischen Motor 1 und 4.
Gyro Einbau
Wichtig: Vor dem Einbau der MEMS-Gyros müssen eventuell vorhandene Piezo-Gyros von der TTCC entfernt werden!
Zudem funktionieren die MEMS erst ab der FW V20! Die TTCC erkennt die neuen Sensoren automatisch, es sind keienrlei Einstellungen nötig.
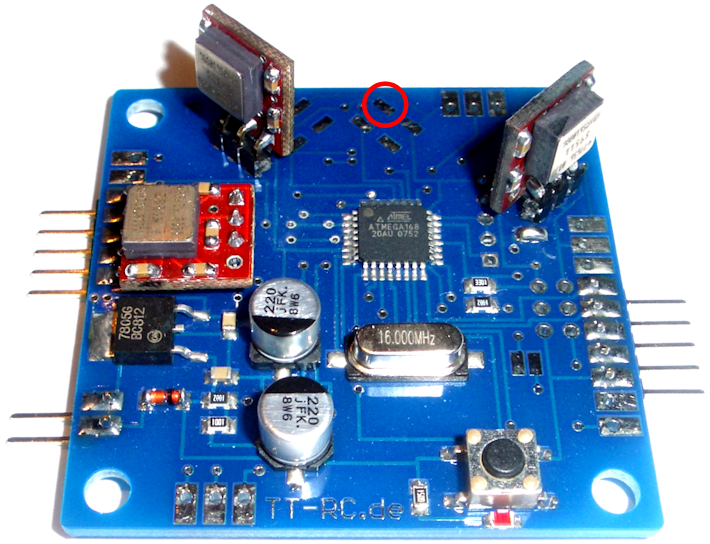
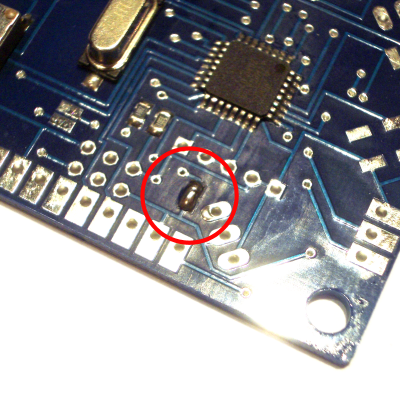 Der auf dem Bild rot umkreiste SMD-Widerstand muss auf älteren TTCC V2 bei Vewendung der MEMS-Gyros überbrückt werden. Er muss dafür nicht entfernt werden, das macht es jedoch einfacher. Bei TTCC V2 ME Platinen, die ab 2014 verkauft wurden (blaue LED) ist dies nicht mehr nötig!
Der auf dem Bild rot umkreiste SMD-Widerstand muss auf älteren TTCC V2 bei Vewendung der MEMS-Gyros überbrückt werden. Er muss dafür nicht entfernt werden, das macht es jedoch einfacher. Bei TTCC V2 ME Platinen, die ab 2014 verkauft wurden (blaue LED) ist dies nicht mehr nötig!
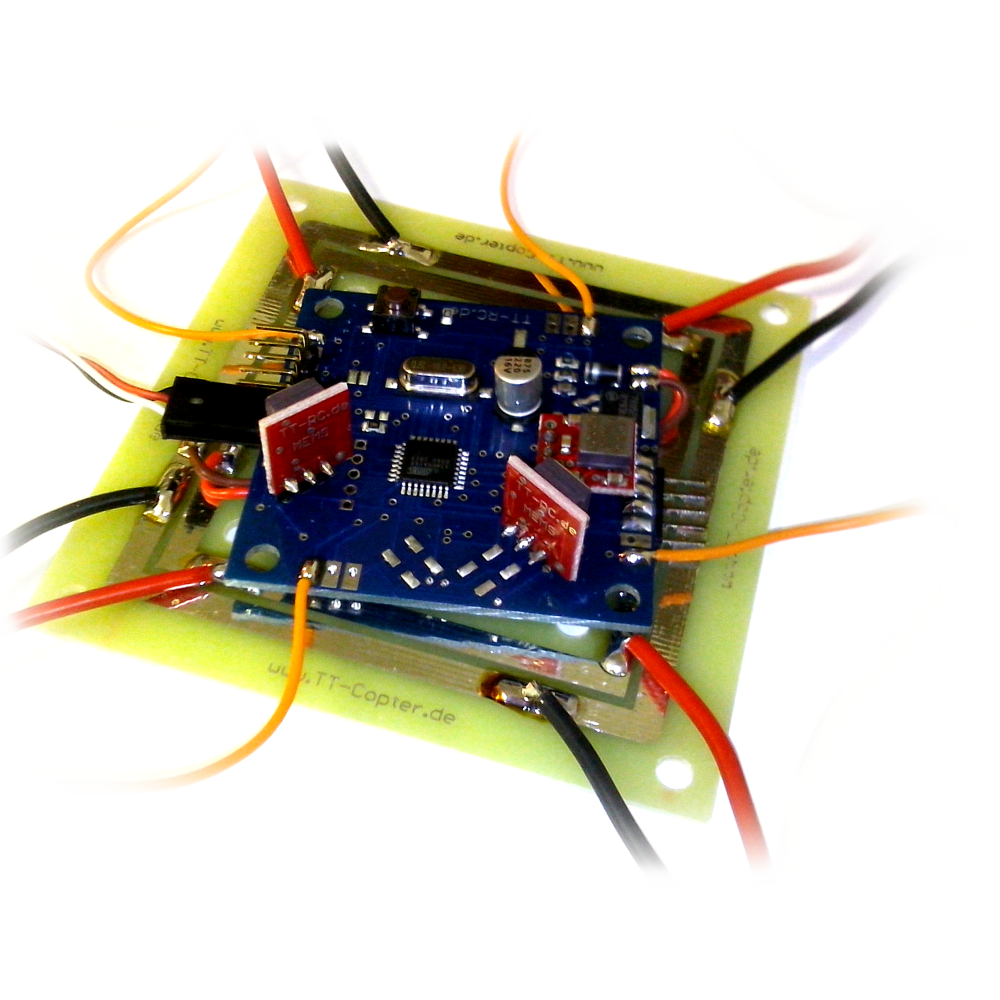
Die beiliegenden Gyroboards müssen danach gemäß dem Bild rechts an die TTCC angelötet werden.
Jeder der Sensoren muss wie folgt eingebaut werden:
 Zuerst muss ein 3-Pin-Abschnitt der nötigen Stiftleiste abgetrennt werden. Diesen dann zuerst an das Gyroboard löten, dabei aufpassen, dass mit dem Lötkolben nicht der Gyro beschädigt wird. Der jeweils letzte runde Lötpunkt bleibt frei, siehe Bild! Nach dem anlöten der Stiftleiste den Gyro an seinem vorgesehenen Platz anbringen, und erst einen Pin zur fixierung anlöten. Darauf achten, dass der Gyro genau richtig ausgerichtet steht! Danach die beiden anderen Pins anlöten.
Zuerst muss ein 3-Pin-Abschnitt der nötigen Stiftleiste abgetrennt werden. Diesen dann zuerst an das Gyroboard löten, dabei aufpassen, dass mit dem Lötkolben nicht der Gyro beschädigt wird. Der jeweils letzte runde Lötpunkt bleibt frei, siehe Bild! Nach dem anlöten der Stiftleiste den Gyro an seinem vorgesehenen Platz anbringen, und erst einen Pin zur fixierung anlöten. Darauf achten, dass der Gyro genau richtig ausgerichtet steht! Danach die beiden anderen Pins anlöten.
Piepser/Summer
Auf der TTCC V2 ist ein Platz integriert um den Summer auf der Platine direkt anzubauen. ("Buzzer" im Anschlussplan)
Es wird ein Summer mit integrierter Elektronik benötigt, welcher an 5V funktioniert. Es sind jeweils 2 + und - Pins vorhanden, davon können 2 beliebige verwendet werden.
Der Summer muss bei der MEMS Version an der Unterseite montiert werden. Eine weitere Möglichkeit ist es, ihn auf Stiftleisten auf der Oberseite zu montieren, da ansonsten ein Gyro im Weg ist.
TTCC-Einbau
Der Pfeil auf der Platine muss in Richtung des vorderen Motors zeigen, und die Bauteile auf der TTCC müssen nach oben gerichtet sein! Im X-Modus ist der vordere Motor dann Rechts-Vorne, der Pfeil auf der Platine muss auch dann in Richtung Motor 1 zeigen!
Auf der TTCC V2 sind alle Anschlüsse so platziert, dass sie bei eingebauter Platine ohne Probleme zu erreichen sind.
Beim berühren des verkleinerten Anschlussplanes rechts wird er vergrößert!
Info: Die Sensoren auf der TTCC V2 ME sind empfindlich auf Vibrationen. Die TTCC muss also schwingungsgedämpft eingebaut werden! Etwa auf Schwingungsdämpfern welche einfach mit M3 oder M4 Schrauben befestigt werden können. Werden Vibrationen auf die TTCC übertragen kommt es zu einem unruhigen Flug.
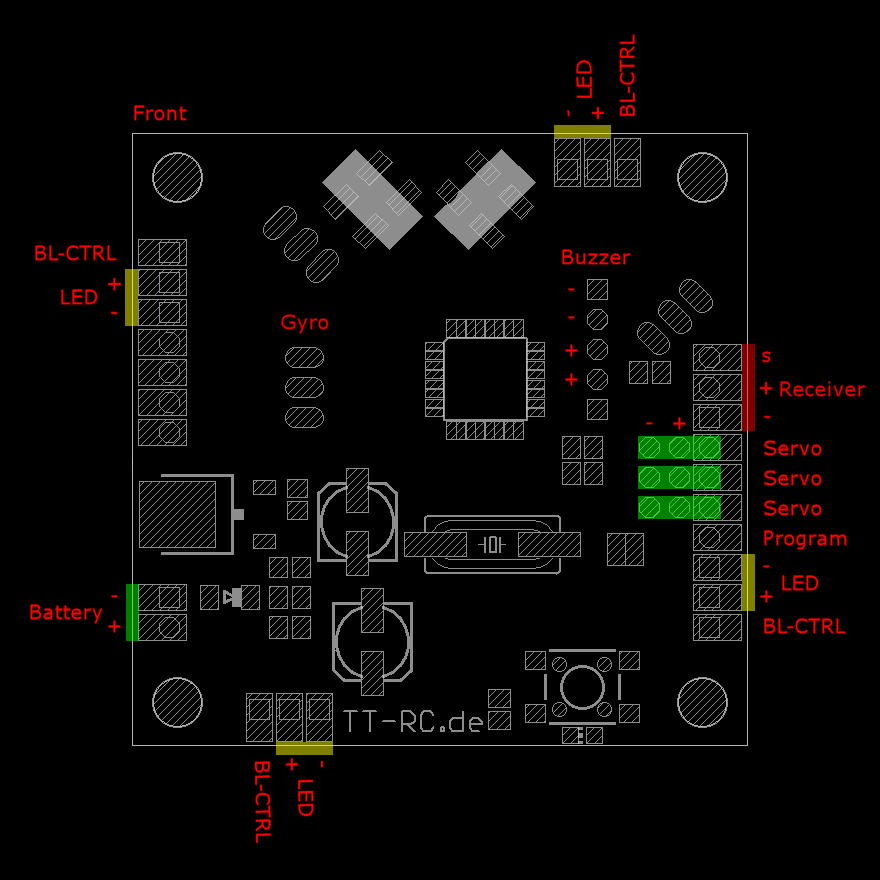 Nun werden alle nötigen Anschlusskabel an der TTCC angelötet oder gesteckt:
Nun werden alle nötigen Anschlusskabel an der TTCC angelötet oder gesteckt:
(Maus über das Bild fahren zum Vergrößern)
Motorregler
Von den Motorreglern muss nur das (orange/weiße) Signalkabel an der TTCC angeschlossen werden.
Die beiden anderen Kabel des Servosteckers müssen entfernt werden.
Jeder Motor muss an den jeweiligen Anschluss der TTCC angeschlossen werden, der in dessen Richtung zeigt. Also den vorderen Motor an den vorderen Anschluss, usw.
Die Stromversorgungskabel (+/-) der Motorregler werden direkt mit dem Akku Verbunden. Hilfreich ist dabei die TT-CenterPlate oder das TT-PowerBoard um den Strom zu verteilen.
Servoanschlüsse
An die TTCC können 3 Servos/Kameraauslöser/Beleuchtungsschalter/usw. angeschlossen werden, welche mit Kanal 6, 7 und 8 bedient werden.
Die Anschlüsse sollten nur schwach belastet werden, bei Anschluss stärkerer Servos sollte eine zusätzliche Stromversorgung (BEC) verwendet werden. Dafür kann z.B. eines der BECs in den Motorreglern benutzt werden. Auch bei Zusätzlichen Verbrauchern (zusätzlich zum Empfänger) sollte eine zusätzliche Stromversorgung erfolgen.
Dazu wird das dünne rote Kabel einer der Regler (BEC, 5V) mit der TTCC verbunden.
Der Anschlusspunkt ist auf dem Bild rechts zu sehen.
Andere Anschlüsse
- Battery: Flugakku, an den Anschlusspads bitte nicht zu lange löten, da die Bauteile in der Nähe hitzeempfindlich sind!
- LEDs: Mit Vorwiderstand anschließen! Nicht über 20mA belasten. Ausgangsspannung: 5V
- Receiver: Empfänger: Minus, Plus, Summensignal
----