
TT-CopterControl V2 ME
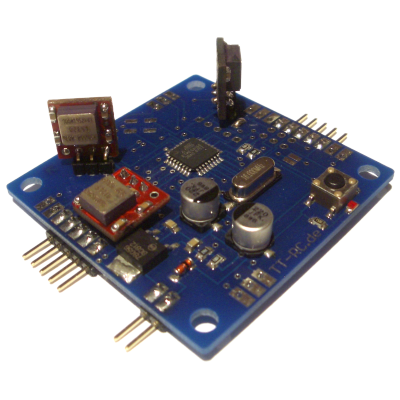
Die TT-CopterControl ist die Hauptsteuereinheit eines jeden TT-Copter Multicopters. Sie wird mit den Motorreglern und dem Empfänger verbunden und ermöglicht einen stabilen Flug.
Die TT-CopterControl V2 ME ist mit sehr hochwertigen MEMS / SMM Sensoren ausgestattet, die günstigere Version TT-CopterControl V2 mit Piezosensoren. Dadurch ist eine sehr genaue und präzise Regelung des TT-Copters möglich. Der Copter folgt exakt den Steuerbewegungen und ist auch in schwierigen Flugsituationen absolut stabil.
Die Einrichtung der TT-CopterControl ist sehr simpel, da sie sich völlig selbstständig auf jeden Multicopter einstellen kann. Durch diese einzigartige Funktion der TT-CC ist es nicht nötig wie bei anderen Multicopter-Steuerungen mit dem PC PID-Werte, Regelparamter, etc. zu programmieren. Ein Multicopter der mit der TT-CC aufgebaut wurde ist sofort flugfähig, egal wie groß, wie schwer und mit welcher Motorisierung. Wird etwas am Multicopter verändert stellt sich die Steuerung automatisch darauf ein.
Sollen Einstellungen am Copter vorgenommen werden so kann dies vollständig über den Fernsteuersender erfolgen, es ist nicht nötig Werte über einen PC oder andere Geräte zu ändern. Dadurch ist die Konfiguration sehr schnell und einfach erledigt.
Plug & Fly
Beide Versionen der TTCC sind außer den Sensoren komplett verlötet, auf Wunsch erhalten sie auch eine komplett einbaufertige Platine welche nur noch angesteckt werden muss.
Neuerungen
- Komplett neues Layout in SMD
- Leistungsfähigerer Prozessor > zukünftige Erweiterbarkeit
- Höhere Genauigkeit der Signalverarbeitung, schnellerer Regelungstakt > Merklich bessere Flugeigenschaften
- Höherer möglicher Maximalschub mit selber Motorisierung
- Anschlüsse praktischer Platziert, Verkabelung schnell und einfach
- Größere Robustheit
- Updatebar über USB (mit TT-USB)
- PC-Diagnose und Konfiguration über USB
- Automatische Konfiguration
- Alle Einstellungen ohne PC möglich
Daten
- Größe: 51 x 51 mm
- Lochabstand: 45mm (63mm Diagonal)
- Lochdurchmesser: 4mm
- Sensoren: 3 Piezo-Gyros oder 3 MEMS Gyros
- Motorregler: Standard PPM Regler (Siehe FAQ)
- Akku: ab 3S (3S LiPo, 4S LiPo, 4S LiFePo)
- Sender: 4-8 Kanal Sender
- Empfänger: Summensignal/TT-RecEnc
Features
- Auto-Lernfunktion: Keine Einstellung der Regelungsparameter nötig. Einzigartige Funktion der TTCC!
- Funktioniert von sehr kleinen bis zu sehr großen Koptern, keine Leistungsgrenze
- Maximale Drehgeschwindigkeit um alle Achsen von 1000°/s (Das entspricht 3 Loops pro Sekunde!)
- Schweben ohne ACC: Driftfreies, ruhiges Schweben ohne zu steuern
- Alle Einstellungen über die Fernsteuerung möglich, kein PC nötig
- 3 Servoanschlüsse an der TTCC
- x oder + Formation
- Auch 8, 12, 16, usw. Motoren möglich
- Automatische konfiguration der angeschlossenen Motorregler auf den TT-Copter Betrieb
- Lageregelung bis ins Standgas, kein Abschalten der Lageregelung bei geringen Gaswerten
Automatische konfiguration der Motorregler
Die angeschlossenen, kompatiblen Motorregler werden automatisch auf den Copterbetrieb eingestellt.
Zum einen werden automatisch die Minimal- und Maximalgas-Werte aller angeschlossenen Regler konfiguriert, um einen Gleichlauf aller 4 Motoren zu gewährleisten. Zum anderen können mit der neuen TTCC die Abschaltspannungen der angeschlossenen Motorregler automatisch auf ein niedriges Niveau gestellt werden, um zu verhindern, dass sich die Motoren bei leer werdendem Akku abschalten, was einen Absturz zur Folge hätte! Das funktioniert vollautomatisch.
Verschiedene Flugmodi
AutoHover
Ein Multicopter mit der TTCC schwebt im Schwebemodus (AutoHover Modus) selbstständig. Bei langsamem Flug bremst er in diesem Modus beim Loslassen der Knüppel automatisch ab und schwebt. Jedoch wird der Pilot beim fliegen in keinster Weise eingeschränkt von dieser Funktion, Loopings sind z.B. kein problem. Das Flugverhalten entspricht in diesem Mode etwa dem eine Koax-Helikokters mit weitaus besserer und präziserer Reaktion auf die Steuerung.
HeadingHold
Es gibt auch einen reinen Heading-Hold Modus, in diesem Modus fliegt der TT-Copter wie ein perfekt eingestellter Hubschrauber. Im Gegensatz zum Hubschrauber kann jedoch eine weitaus größere Agilität erreicht werden falls gewünscht, oder aber mit einer einzigen Knüppelbewegung auch in einen ruhigeren Modus gewechstelt werden, mit weit stabilerem, beherrschbarerem Flugverhalten als selbst bei großen Hubschraubern.
Auch die Ausrichtung, also ob ein oder 2 Propeller vorne sein sollen kann ganz einfach gewählt werden.
Insgesamt gibt es 16 Einstellungskombinationen, da sollte für jeden das passende Flugverhalten dabei sein.
Weitere Funktionen
Um die Funktionalität zu erweitern kann die TT-HoverControl zusätzlich montiert werden.
Weitere Informationen finden sich unter "TT-HC" im Menü links.
----